My research focus is on controlling teams of robots to collect information about physical processes of interest in applications such as environmental monitoring, security and surveillance, localization and mapping, construction and structure inspection, agriculture, and search and rescue. The message of my work is that transitioning from static, manual data collection to autonomous robot deployments will result in accurate and efficient sampling, higher-fidelity models, reduced human supervision, access to dangerous areas, and adaptation to environment conditions. My research has contributed towards this vision by focusing on control and estimation techniques for multi-robot active information acquisition and on semantic representations for localization, mapping, and navigation.
Active Information Acquisition
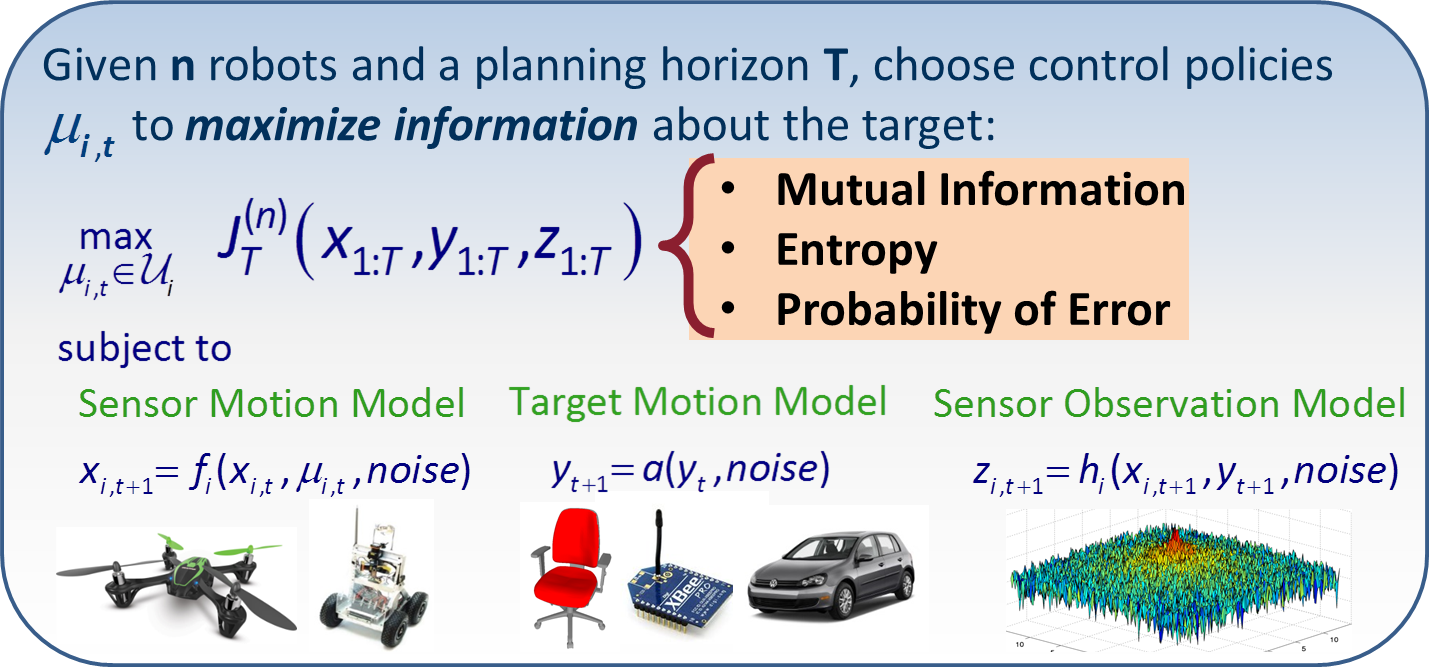
Information acquisition is the process of estimating the state of observed phenomena of interest by utilizing the available sensing modalities. Active information acquisition, on the other hand, is the process of controlling a team of n sensing robots in order to improving the accuracy and efficiency of the estimation process over a planning horizon of T steps. It couples the estimation problem with a stochastic control problem, whose objective function is an information measure, used to judge the informativeness of the planned robot trajectories. The main challenge is to design coupled estimation-control techniques that model the evolution of the robots, targets and measurements accurately and are scalable in both n and T.
Multi-robot Active SLAM (Video 1) A simultaneous localization and mapping (SLAM) problem, in which the task of n robots is to autonomously explore the environment and map landmarks of interest, while staying well localized, can be cast as an active information acquisition problem. The goal is to design control policies for the robots that, e.g., minimize the entropy of the joint map-robot state. The original problem with nonlinear motion and observation models can be converted into a linear Gaussian one via statistical linearization and model predictive control. We proved that the classic separation principle between estimation and control holds for the linear Gaussian active information acquisition problem. As a result, the optimal estimator is the Kalman filter, the entropy is proportional to the log-determinant of the covariance matrix, and the problem can be reduced to deterministic optimal control. Still, the complexity of computing the optimal open-loop policy scales exponentially with the planning horizon T and the number of robots n. My collaborators and I developed approximation algorithms that reduce the complexity in T by discarding uninformative robot trajectories from the search and in n by decentralizing both the control and estimation processes. We proved that the our algorithms have bounded suboptimality regardless of the length of the planning horizon and obtain at least 50% of the (mutual) information achievable by the theoretically optimal centralized solution.
Relevant publications: [ICRA'15] [ICRA'14] [CDC'14]Environmental Monitoring (Video 2) Environmental monitoring is another task of practical importance that can be addressed via active information acquisition. Consider the problem of localizing the source of a physical signal of interest, such as magnetic force, heat, radio or chemical concentration, using a robot team. My collaborators and I proposed distributed control strategies for source seeking specific to two scenarios: one in which the robots have a noisy model of the signal formation process and one in which a signal model is not available. In the model-free scenario, the robot team follows a stochastic gradient of the signal field. Our approach is robust to deformations in the group geometry, does not necessitate global localization, and is guaranteed to lead the robots to a neighborhood of a local maximum of the field. Video 2 demonstrates the performance of the model-free algorithm using a single robot to localize the source of a wireless radio signal. In the model-based scenario, the robots follow a stochastic gradient of the mutual information between predicted signal measurements and the predicted source location. In contrast with existing work which insists on improving the quality of the gradient estimate as much as possible, we show that good performance can be achieved by using only a few predicted signal measurements.
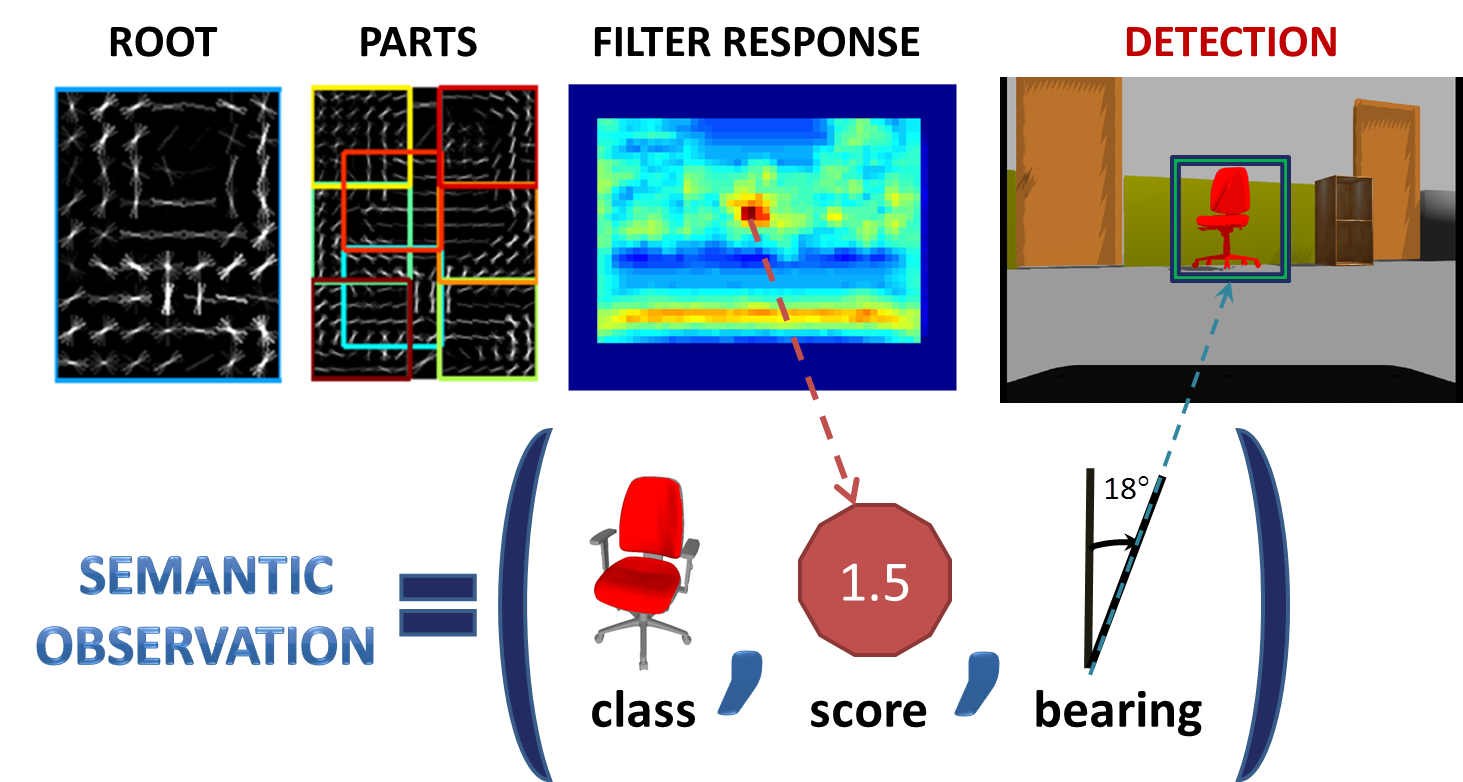
Relevant publications: [ICRA'12] [JDSMC'15]Active Object Recognition (Video 3, Video 4) While a large class of active information gathering problems can be handled via linearization and model predictive control, the approach cannot be used when some measurement or state variables are discrete (e.g., scene labels, object classes, medical hypotheses). Such complications arise in active vision, classification, and hypothesis testing problems. In these cases, non-greedy closed-loop planning is needed to solve the stochastic active information acquisition problem. We proposed an exact planning algorithm based on dynamic programming that obtains the optimal solution but scales poorly with the size of the state and measurement spaces. To provide scalability, we developed an approximation algorithm based on Monte Carlo tree search with a rollout policy that exploits the structure of the information measure to improve the convergence speed. These ideas enable active object classification and pose estimation with a mobile depth camera (Video 3) and can significantly accelerate object recognition with deformable part models (Video 4). Our experiments suggest that active approaches for camera view planning provide a significant improvement over static object recognition. Also, the main advantage of non-greedy planning is that it allows high-confidence object recognition with an adaptive stopping criterion that depends on the observations received online. In the case of single-image object detection, we showed that an active part scheduling approach can accelerate inference with pictorial structures substantially, without sacrificing accuracy. Unlike existing approaches, which use a pre-specified part order and hard stopping thresholds, our approach optimizes the part order and the stopping criterion adaptively, based on the filter responses obtained during inference.
Relevant publications: [T-RO'14] [ICRA'13] [ECCV'14]Video 1: Decentralized multi-robot active SLAM
Video 2: Wireless radio source seeking
Video 3: Active object recognition with a mobile depth camera
Video 4: Active deformable part models for faster object detection
Semantic Localization, Mapping & Navigation
A complementary direction to developing scalable information-seeking techniques is devising better representations for localization, mapping, and navigation. The recent impressive progress in robotics is due in large part to the advances in inference techniques based on graphical models and simultaneous localization and mapping (SLAM) algorithms. For example, flying a quadrotor away from the motion capture system would not be possible without SLAM, just like Google's Project Tango would be nothing more than an Andorid phone. While existing SLAM approaches are quite mature, they rely heavily on (continuous Gaussian) geometric features such as points, lines, and planes and cannot handle (discrete) semantic information such as recognized objects in the robot's surroundings.
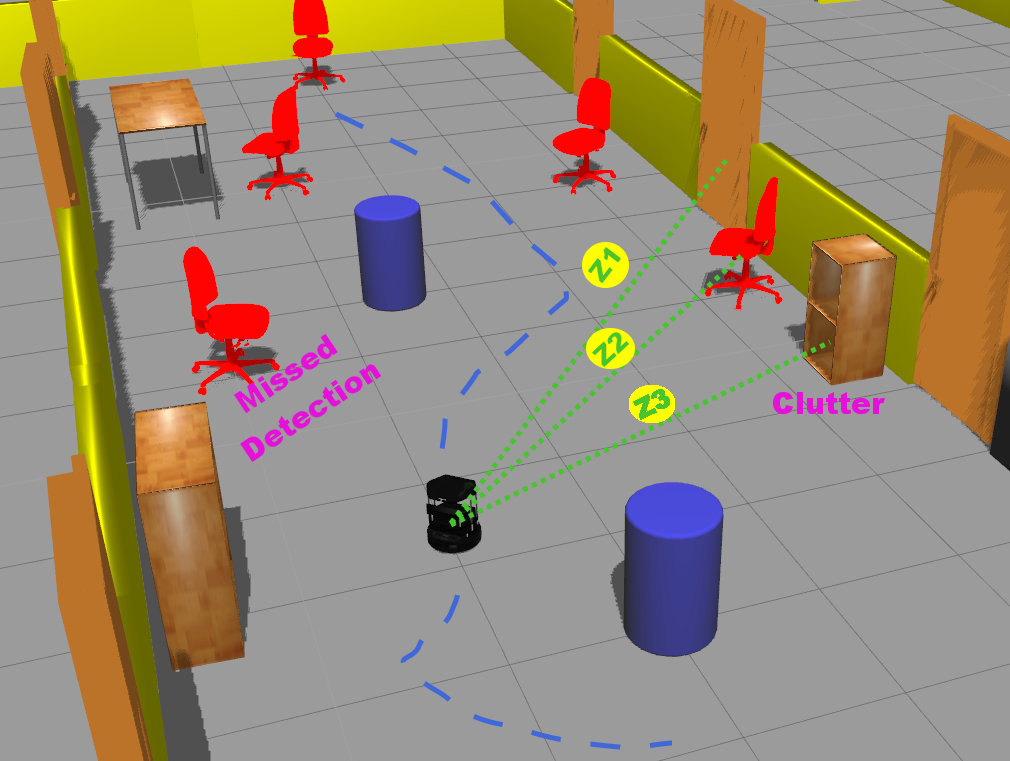
Our contribution is a sensor measurement model for set-valued observations that captures both metric and semantic information and incorporates missed and false detections and unknown data association. We proved that obtaining the likelihood of a set-valued observation is equivalent to a matrix permanent computation. This crucial transformation led to an efficient polynomial-time approximation of Bayesian filtering with set-valued observations. These ideas enable robot and vehicle localization in residential areas using semantic information from object recognition (Video 5, Video 7) and global localization of Google's Project Tango phone. We have extended these results to semantic mapping (Video 6) and active localization, in which the vehicle trajectory is optimized (using ideas from active information gathering) in order to improve the localization performance. Finally, one can go beyond SLAM and formulate high-level missions for the robot described in terms of the objects on the map. We developed an approach for motion planning under linear temporal logic (LTL) constraints in probabilistic semantic maps. We proved that the stochastic LTL planning problem can be reduced to a deterministic shortest path problem while maintaining probabilistic correctness guarantees. This allows computing the optimal robot trajectory in the subspace of deterministic plans that guarantee a given probability of satisfying the logic specification.
Relevant publications: [RSS'14][IJRR'15][ICRA'16]Video 5: Vehicle localization in a residential area using object recognition
Video 6: Simultaneous localization and mapping using semantic information
Video 7: Mobile robot localization using object recognition